
ຫຼັກການເຮັດວຽກໃນເວລາຜ່ານແດນ
ຫຼັກການຂອງການວັດແທກ:
ຫຼັກການຄວາມສຳພັນລະຫວ່າງເວລາຜ່ານແດນເຮັດໃຫ້ໃຊ້ຄວາມຈິງທີ່ວ່າເວລາບິນຂອງສັນຍານ ultrasonic ໄດ້ຮັບຜົນກະທົບຈາກຄວາມໄວການໄຫຼຂອງສື່ກາງ.ຄືກັບນັກລອຍນ້ຳທີ່ກຳລັງແລ່ນຂ້າມແມ່ນ້ຳທີ່ໄຫຼລົງມາ, ສັນຍານ ultrasonic ເຄື່ອນທີ່ຊ້າກວ່າກະແສນ້ຳລົງ.
ຂອງພວກເຮົາTF1100 ເຄື່ອງວັດແທກການໄຫຼ ultrasonicເຮັດວຽກຕາມຫຼັກການເວລາຜ່ານແດນນີ້:
Vf = Kdt/TL
ບ່ອນທີ່:
ຄວາມໄວ VcFlow
K: ຄົງທີ່
dt: ຄວາມແຕກຕ່າງໃນເວລາບິນ
TL: Ave rage Transit Time
ໃນເວລາທີ່ເຄື່ອງວັດແທກການໄຫຼເຮັດວຽກ, ທັງສອງ transducers ສົ່ງແລະຮັບສັນຍານ ultrasonic ຂະຫຍາຍໂດຍ multi beam ທີ່ເດີນທາງທໍາອິດລົງລຸ່ມແລະຫຼັງຈາກນັ້ນ upstream.ເນື່ອງຈາກວ່າສຽງ ultra ເຄື່ອນທີ່ໄວກວ່າລຸ່ມນ້ໍາ, ມັນຈະມີຄວາມແຕກຕ່າງຂອງເວລາການບິນ (dt).ໃນເວລາທີ່ການໄຫຼແມ່ນຍັງ, ຄວາມແຕກຕ່າງເວລາ (dt) ແມ່ນສູນ.ດັ່ງນັ້ນ, ຕາບໃດທີ່ພວກເຮົາຮູ້ເວລາຂອງການບິນທັງ downstream ແລະ upstream, ພວກເຮົາສາມາດເຮັດວຽກອອກຄວາມແຕກຕ່າງຂອງເວລາ, ແລະຫຼັງຈາກນັ້ນຄວາມໄວການໄຫຼ (Vf) ຜ່ານສູດດັ່ງຕໍ່ໄປນີ້.

V ວິທີການ
W ວິທີການ
Z ວິທີການ
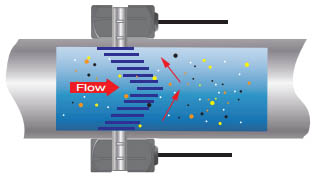
ຫຼັກການປະຕິບັດການ Doppler
ໄດ້DF6100series flowmeter ດໍາເນີນການໂດຍການສົ່ງສຽງ ultrasonic ຈາກ transmitting transducer ຂອງຕົນ, ສຽງຈະໄດ້ຮັບການສະທ້ອນໃຫ້ເຫັນໂດຍ reflectors sonic ທີ່ເປັນປະໂຫຍດ supended ພາຍໃນຂອງແຫຼວແລະບັນທຶກໄວ້ໂດຍ transducer ຮັບ.ຖ້າຕົວສະທ້ອນແສງ sonic ກໍາລັງເຄື່ອນທີ່ພາຍໃນເສັ້ນທາງການສົ່ງສຽງ, ຄື້ນສຽງຈະຖືກສະທ້ອນຢູ່ທີ່ຄວາມຖີ່ຂອງການປ່ຽນ (ຄວາມຖີ່ Doppler) ຈາກຄວາມຖີ່ຂອງການຖ່າຍທອດ.ການປ່ຽນແປງໃນຄວາມຖີ່ຈະກ່ຽວຂ້ອງໂດຍກົງກັບຄວາມໄວຂອງອະນຸພາກເຄື່ອນທີ່ຫຼືຟອງ.ການປ່ຽນແປງໃນຄວາມຖີ່ນີ້ຖືກຕີຄວາມໂດຍເຄື່ອງມືແລະປ່ຽນເປັນຫນ່ວຍວັດແທກທີ່ກໍານົດໂດຍຜູ້ໃຊ້ຕ່າງໆ.
ຕ້ອງມີບາງອະນຸພາກໃຫຍ່ພໍທີ່ຈະເຮັດໃຫ້ເກີດການສະທ້ອນຕາມລວງຍາວ - ອະນຸພາກທີ່ໃຫຍ່ກວ່າ 100 micron.
ເມື່ອຕິດຕັ້ງ transducers, ສະຖານທີ່ຕິດຕັ້ງຕ້ອງມີຄວາມຍາວທໍ່ຊື່ພຽງພໍຢູ່ທາງເທິງແລະລຸ່ມ.ໂດຍທົ່ວໄປແລ້ວ, ສາຍນ້ໍາຕ້ອງການ 10D ແລະລຸ່ມນ້ໍາຕ້ອງການ 5D ຄວາມຍາວທໍ່ຊື່, ບ່ອນທີ່ D ແມ່ນເສັ້ນຜ່າສູນກາງຂອງທໍ່.
ຫຼັກການເຮັດວຽກຂອງຄວາມໄວພື້ນທີ່
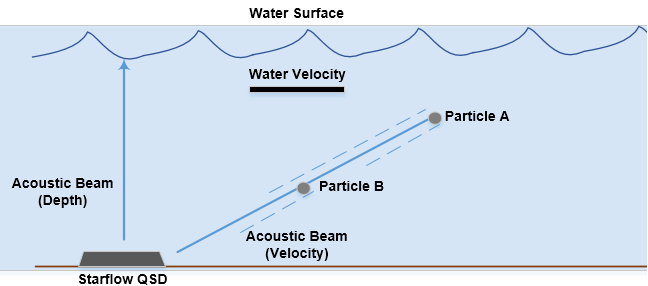
DOF6000series open channel flow meter ໃຊ້ Continuous Mode Doppler ເພື່ອກວດຫາຄວາມໄວຂອງນ້ໍາ, ສັນຍານ ultrasonic ຖືກສົ່ງເຂົ້າໄປໃນການໄຫຼຂອງນ້ໍາແລະສຽງສະທ້ອນ (ສະທ້ອນ) ກັບຄືນຈາກ particles supended ໃນການໄຫຼນ້ໍາໄດ້ຖືກຮັບແລະວິເຄາະເພື່ອສະກັດ Doppler shift (ຄວາມໄວ).ລະບົບສາຍສົ່ງແມ່ນຢ່າງຕໍ່ເນື່ອງແລະພ້ອມໆກັນກັບການຮັບສັນຍານກັບຄືນ.
ໃນລະຫວ່າງການວັດແທກຮອບວຽນ Ultraflow QSD 6537 ປ່ອຍສັນຍານຢ່າງຕໍ່ເນື່ອງ ແລະວັດແທກສັນຍານທີ່ກັບຄືນມາຈາກເຄື່ອງກະແຈກກະຈາຍຢູ່ທຸກບ່ອນ ແລະທຸກບ່ອນຕາມລຳແສງ.ສິ່ງເຫຼົ່ານີ້ຖືກແກ້ໄຂເປັນຄວາມໄວສະເລ່ຍທີ່ສາມາດພົວພັນກັບຄວາມໄວການໄຫຼຂອງຊ່ອງທາງຢູ່ໃນສະຖານທີ່ທີ່ເຫມາະສົມ.
ຕົວຮັບໃນເຄື່ອງມືກວດພົບສັນຍານສະທ້ອນແລະສັນຍານເຫຼົ່ານັ້ນຖືກວິເຄາະໂດຍໃຊ້ເຕັກນິກການປະມວນຜົນສັນຍານດິຈິຕອນ.
ການວັດແທກຄວາມເລິກຂອງນ້ໍາ - Ultrasonic
ສໍາລັບການວັດແທກຄວາມເລິກ Ultraflow QSD 6537 ໃຊ້ Time-of-Flight (ToF) Ranging.ນີ້ກ່ຽວຂ້ອງກັບການສົ່ງສັນຍານ ultrasonic ການລະເບີດຂຶ້ນເທິງຫນ້າດິນຂອງນ້ໍາແລະການວັດແທກເວລາທີ່ປະຕິບັດສໍາລັບສຽງສະທ້ອນຈາກຫນ້າດິນທີ່ຈະໄດ້ຮັບໂດຍເຄື່ອງມື.ໄລຍະຫ່າງ (ຄວາມເລິກຂອງນ້ໍາ) ແມ່ນອັດຕາສ່ວນກັບເວລາການຂົນສົ່ງແລະຄວາມໄວຂອງສຽງໃນນ້ໍາ (ແກ້ໄຂສໍາລັບອຸນຫະພູມແລະຄວາມຫນາແຫນ້ນ).
ການວັດແທກຄວາມເລິກ ultrasonic ສູງສຸດແມ່ນຈໍາກັດເຖິງ 5m.
ການວັດແທກຄວາມເລິກຂອງນ້ໍາ - ຄວາມກົດດັນ
ສະຖານທີ່ບ່ອນທີ່ນ້ໍາມີຈໍານວນຂີ້ເຫຍື້ອຫຼືຟອງອາກາດຫຼາຍອາດຈະບໍ່ເຫມາະສົມສໍາລັບການວັດແທກຄວາມເລິກ ultrasonic.ສະຖານທີ່ເຫຼົ່ານີ້ແມ່ນເຫມາະສົມກັບການນໍາໃຊ້ຄວາມກົດດັນເພື່ອກໍານົດຄວາມເລິກຂອງນ້ໍາ.
ການວັດແທກຄວາມເລິກໂດຍອີງໃສ່ຄວາມກົດດັນອາດຈະໃຊ້ກັບສະຖານທີ່ທີ່ເຄື່ອງມືບໍ່ສາມາດຕັ້ງຢູ່ເທິງພື້ນຂອງຊ່ອງທາງການໄຫຼຫຼືມັນບໍ່ສາມາດຕິດຢູ່ໃນແນວນອນ.
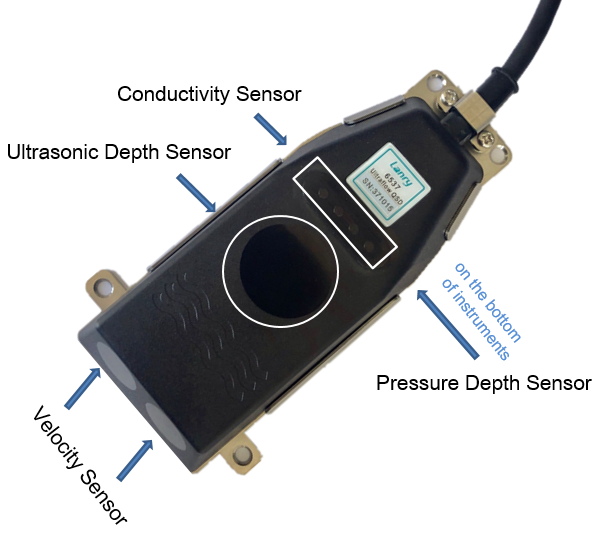
Ultraflow QSD 6537 ຖືກຕິດຕັ້ງດ້ວຍເຊັນເຊີຄວາມກົດດັນຢ່າງແທ້ຈິງ 2 bar.ເຊັນເຊີຕັ້ງຢູ່ດ້ານລຸ່ມຂອງເຄື່ອງມືແລະໃຊ້ອົງປະກອບການຮັບຮູ້ຄວາມກົດດັນດິຈິຕອນທີ່ຊົດເຊີຍອຸນຫະພູມ.
ບ່ອນທີ່ເຊັນເຊີຄວາມກົດດັນຄວາມເລິກຖືກນໍາໃຊ້, ການປ່ຽນແປງຂອງຄວາມກົດດັນຂອງບັນຍາກາດຈະເຮັດໃຫ້ເກີດຄວາມຜິດພາດໃນຄວາມເລິກທີ່ລະບຸໄວ້.ນີ້ແມ່ນການແກ້ໄຂໂດຍການຫັກຄວາມກົດດັນຂອງບັນຍາກາດອອກຈາກຄວາມກົດດັນຄວາມເລິກທີ່ວັດແທກໄດ້.ເພື່ອເຮັດສິ່ງນີ້, ມີເຊັນເຊີຄວາມກົດດັນ barometric.ໂມດູນການຊົດເຊີຍຄວາມກົດດັນໄດ້ຖືກສ້າງຂຶ້ນໃນເຄື່ອງຄິດເລກ DOF6000 ເຊິ່ງຫຼັງຈາກນັ້ນອັດຕະໂນມັດຈະຊົດເຊີຍການປ່ຽນແປງຄວາມກົດດັນຂອງບັນຍາກາດເພື່ອຮັບປະກັນການວັດແທກຄວາມເລິກທີ່ຖືກຕ້ອງ.ນີ້ເຮັດໃຫ້ Ultraflow QSD 6537 ລາຍງານຄວາມເລິກຂອງນ້ໍາຕົວຈິງ (ຄວາມກົດດັນ) ແທນທີ່ຈະເປັນຄວາມກົດດັນ barometric ບວກກັບຫົວນ້ໍາ.
ອຸນຫະພູມ
ເຊັນເຊີອຸນຫະພູມສະຖານະແຂງແມ່ນໃຊ້ເພື່ອວັດແທກອຸນຫະພູມນ້ໍາ.ຄວາມໄວຂອງສຽງໃນນ້ໍາແລະການນໍາຂອງມັນໄດ້ຮັບຜົນກະທົບຈາກອຸນຫະພູມ.ເຄື່ອງມືໃຊ້ອຸນຫະພູມທີ່ວັດແທກໄດ້ເພື່ອຊົດເຊີຍການປ່ຽນແປງນີ້ໂດຍອັດຕະໂນມັດ.
ການນໍາໄຟຟ້າ (EC)
Ultraflow QSD 6537 ແມ່ນມີຄວາມສາມາດໃນການວັດແທກການນໍາຂອງນ້ໍາ.ການຕັ້ງຄ່າເສັ້ນຊື່ສີ່ electrode ແມ່ນໃຊ້ເພື່ອເຮັດໃຫ້ການວັດແທກ.ກະແສໄຟຟ້າຂະຫນາດນ້ອຍແມ່ນຜ່ານນ້ໍາແລະແຮງດັນທີ່ພັດທະນາໂດຍປະຈຸບັນນີ້ຖືກວັດແທກ.ເຄື່ອງມືດັ່ງກ່າວໃຊ້ຄ່າເຫຼົ່ານີ້ເພື່ອຄິດໄລ່ການນໍາທາງທີ່ບໍ່ຖືກແກ້ໄຂເປັນວັດຖຸດິບ.